
Evaluation and tuning of brake systems – from HiL to the driving simulator
MXbrakeLink: A MXbrakeHiL-Based Brake Pedal Feedback Architecture for Driver-in-the-Loop Simulation
Reproducing authentic brake pedal feedback in a Driver-in-the-Loop (DiL) simulator is technically demanding. Hydraulic nonlinearities, ABS pressure pulsation, and ESC intervention dynamics are difficult to replicate with sufficient fidelity for meaningful subjective driver evaluation.
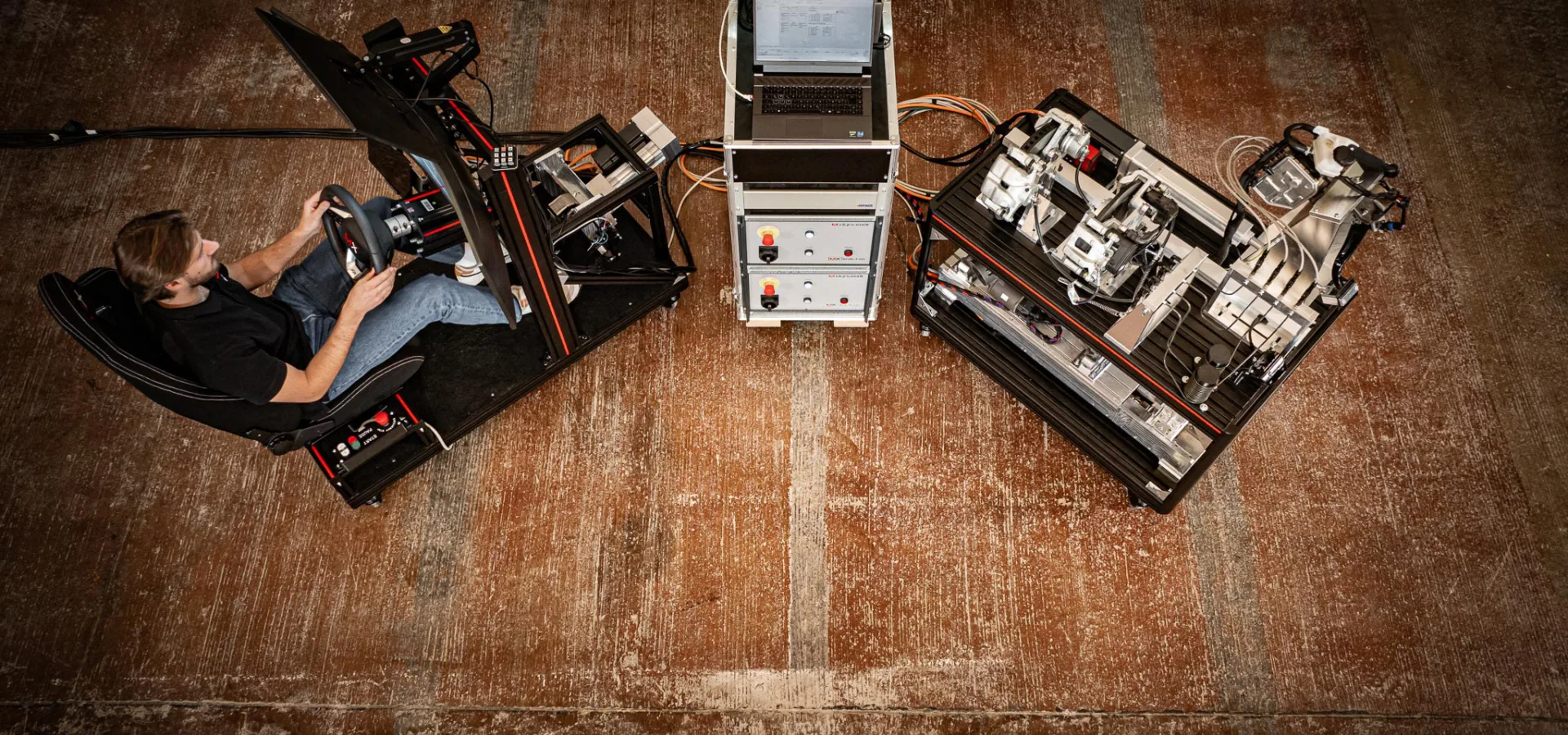
MXbrakeLink addresses this by establishing a real-time, low-latency haptic coupling between a complete physical brake system on an MXbrakeHiL test bench and the MXbrakePedal (Force Feedback Brake Pedal) inside a DiL simulator. Force feedback is transferred directly to the driver’s foot while the brake hardware remains stationary in the laboratory, preserving both measurement reproducibility and the simulator’s dynamic motion envelope.
Haptic Fidelity and Actuation Performance
- Authentic Brake Pedal Feel: Enables drivers to experience realistic force–travel characteristics, ABS pulsation, and nonlinear hydraulic effects exactly as they occur in the physical brake system.
- Ultra-Low Latency: Engineered for fast dynamic events, confirmed by OEMs and race drivers.
- High-Fidelity Actuation: The MXbrakePedal utilizes a high-power spindle actuator capable of generating over 6 kN of force, accurately rendering everything from subtle stiffness changes in day-to-day driving to sudden booster interventions.
End-to-End Workflow: Closing the Loop Between HiL and DiL

MXbrakeLink enables a continuous development workflow between HiL-based objective testing and DiL-based subjective evaluation, with no discontinuity between phases.
- Bidirectional coupling: Calibration variants, brake pedal maps, and blending parameters set on DuT on the MXbrakeHiL are immediately available for subjective evaluation with a human driver in a controlled environment.
- Objective–subjective correlation: Integration with MXeval provides automated KPI-based analysis — including pressure build-up dynamics and ABS signature metrics. Integration with MXevalApp captures structured driver feedback. Both datasets share a common data structure to support direct comparison of objective measurements and subjective driver ratings.
- Modular architecture: Compatible with conventional hydraulic systems, electromechanical boosters, and brake-by-wire (BBW) architectures.
- Framework-independent operation: Functions on fixed-base and dynamic motion simulators. Supports all EtherCAT-based real-time environments, including dSPACE, VI-Grade, Vector, and IPG.
Key Facts des MXbrakeLink
- Real-time haptic coupling between MXbrakeHiL test bench and DiL simulator.
- MXbrakePedal spindle actuator peak force: > 6 kN.
- Reproduces ABS pulsation, hydraulic nonlinearities, and booster dynamics.
- Bidirectional parameter transfer between HiL and DiL environments.
- Compatible with hydraulic, electromechanical booster, and brake-by-wire systems.
- Framework and RT-system-independent: dSPACE, VI-Grade, Vector, IPG.
- Operates on fixed-base and dynamic motion platforms.
- EtherCAT-based real-time communication.
- Integrated with MXeval and MXevalApp for objective and subjective data alignment.
Benefits for Development Engineers
- Subjective brake feel evaluation becomes possible earlier in the development cycle, before a physical prototype vehicle is available.
- Calibration changes made on the HiL bench are immediately assessable by a driver, shortening iteration cycles.
- Heavy brake hardware stays in the laboratory — no integration into a simulator vehicle required.
- Objective KPIs and structured driver ratings share a unified data format, reducing post-processing effort.
- A single test setup covers both objective measurement and subjective sign-off.
- The modular architecture supports reuse across brake system variants and vehicle programs.
- Simulator motion is not compromised by the brake hardware or the coupling mechanism.
- Consistent test conditions across sessions improve repeatability of subjective evaluations.