
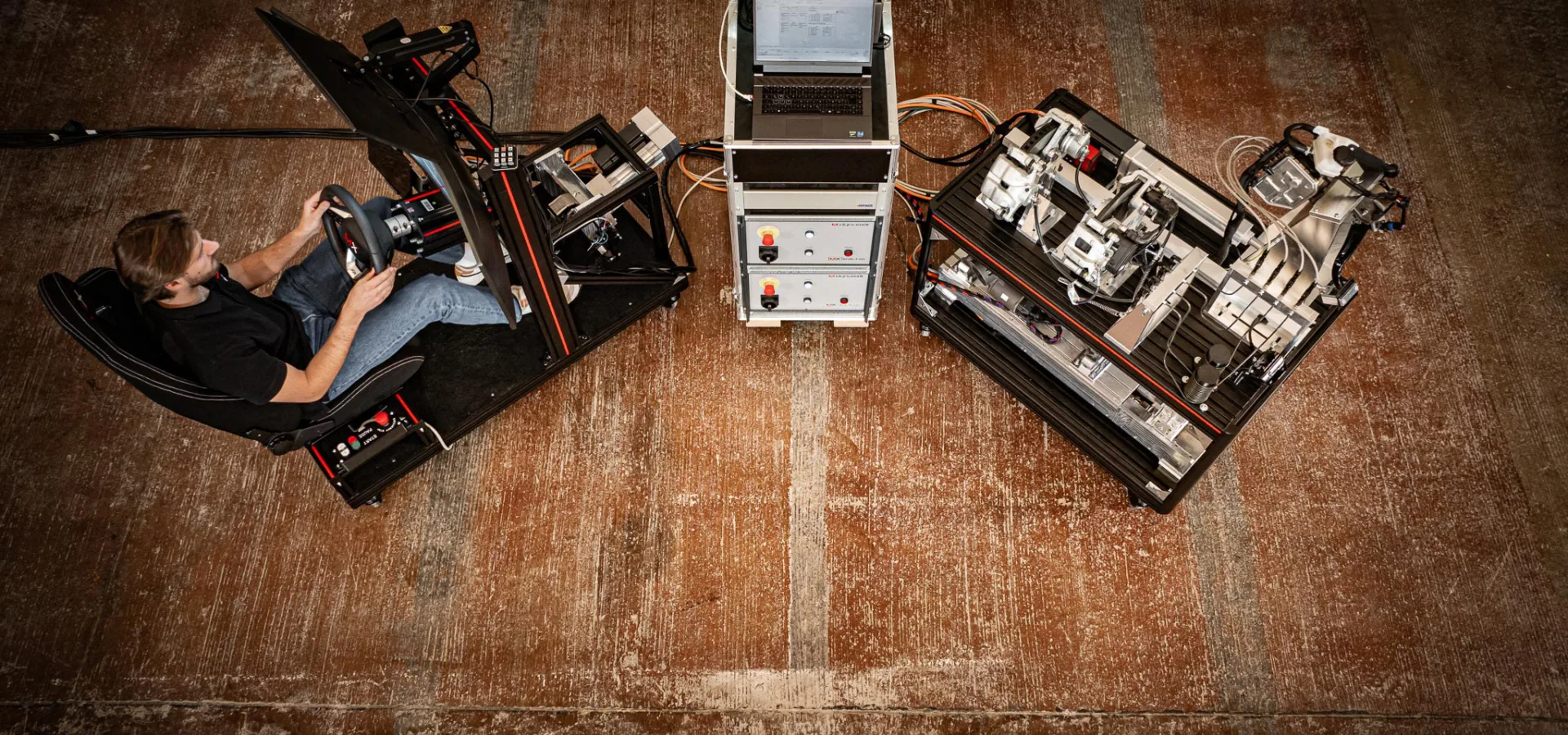
Evaluation and tuning of brake systems — standalone force-feedback characterisation
MXbrakePedal: Haptic Brake Pedal Actuator for Driver-in-the-Loop Simulation
Brake pedal feel, controllability, and driver comfort are measurable, brand-defining vehicle attributes. Reproducing authentic haptic feedback in a driving simulator requires hardware that accurately replicates the force-displacement behavior of a real brake system.
The MXbrakePedal is a haptic actuator developed by MdynamiX specifically for reproducing brake pedal behavior in Driver-in-the-Loop (DiL) simulation environments. The actuator replaces the master cylinder and connects directly to the original brake pedal of the simulator cockpit, preserving authentic pedal geometry and ensuring that all forces and displacements act through the original mechanical path. A standing pedal variant is available.

Haptic Fidelity and Dynamic Performance
- Direct integration: the MXbrakePedal replaces the master cylinder and connects to the original vehicle brake pedal, preserving authentic pedal geometry throughout.
- High-force actuation: the spindle actuator generates over 6 kN of force, covering the pedal force range of passenger cars, high-performance vehicles, and motorsport applications.
- High bandwidth: the system accurately reproduces fast transient events including ABS-induced pulsation, sudden stiffness changes, and brake booster interventions.
- Precision and repeatability: high sampling-rate force sensing, precise position feedback, and real-time control loops provide low-latency response and a repeatable brake pedal feel, enabling consistent evaluation of demanding maneuvers.
Configurability: Real-Time Parameterisation of All Pedal Variables
- Real-time parameter adjustment: all pedal variables — including ABS effect profiles — can be adjusted in real-time without interrupting a test session.
- Instant A/B Testing:distinct pedal characteristics can be switched at the push of a button, accelerating subjective evaluation studies.
- Dual operation modes: the system operates in standalone mode via a GUI for KPI-based tuning or receives force inputs directly from a real-time simulation model or from the MXbrakeLink hardware interface.
- Complete pedal box expansion: the active brake pedal unit can be extended to include passive or fully active accelerator and clutch pedals, forming a comprehensively adjustable simulator pedal box.
Standalone Operation and HiL-Integration with MXbrakeLink
The MXbrakePedal is designed for operation either as an independent tuning station or as part of a Hardware-in-the-Loop (HiL) test network. In integrated test scenarios, the pedal receives commands directly from a real-time simulation model or via the MXbrakeLink interface, enabling brake pedal characteristics derived directly from physical brake hardware.
When operating in standalone mode, the system is controlled through an intuitive GUI that enables rapid KPI-based tuning of pedal feel parameters without a connected simulation model.
Technical Specifications: MXbrakePedal Standalone
- actuation force: up to 7 kN
- Weight: approx. 5 kg
- Dimensions: 60 × 60 × 370 mm
- Spindle travel: up to 150 mm
Payload on the dynamic driving simulator platform is reduced significantly compared to real brake system integration, as the master cylinder and brake fluid circuit are eliminated.
Key Facts of MXbrakePedal
- Actuator type: high-power spindle drive
- Force sensing: high sampling-rate, real-time
- Control: real-time force and position feedback loops with low latency
- Operation modes: standalone GUI or real-time simulation model input (incl. MXbrakeLink)
- Pedal geometry: direct replacement of master cylinder; original pedal geometry retained
- Standing pedal variant available
- Expandable to include passive or fully active accelerator and clutch pedals
Benefits of MXbrakePedal for development engineers
- Authentic pedal geometry: direct master cylinder replacement preserves the original mechanical interface — no compromises in pedal feel realism due to adapter geometry.
- Measurable subjectivity: brake pedal feel attributes that are traditionally evaluated subjectively become parameterized, measurable, and reproducible.
- Reduced simulator payload: eliminating the master cylinder and brake circuit hardware reduces the moving mass on the simulator platform compared to full brake system integration.
- Accelerated tuning cycles: real-time parameter adjustment and instant A/B switching reduce the iteration time for pedal feel development studies.
- Flexible deployment: standalone operation enables use as a development or calibration tool independent of a full HiL or DiL setup.
- Scalable hardware: expansion to a full active pedal box (accelerator and clutch) is available within the same system architecture.
- Broad application range: force output up to 7 kN covers the full pedal force spectrum from passenger car to motorsport, within a single hardware platform.
Subjective brake pedal feel becomes measurable, tunable, and reproducible.
Contact our experts at MdynamiX to discuss your brake pedal feel and simulator integration requirements.