The ideal platform for practical ADAS/AD development
Technical specifications of the MXcarkit
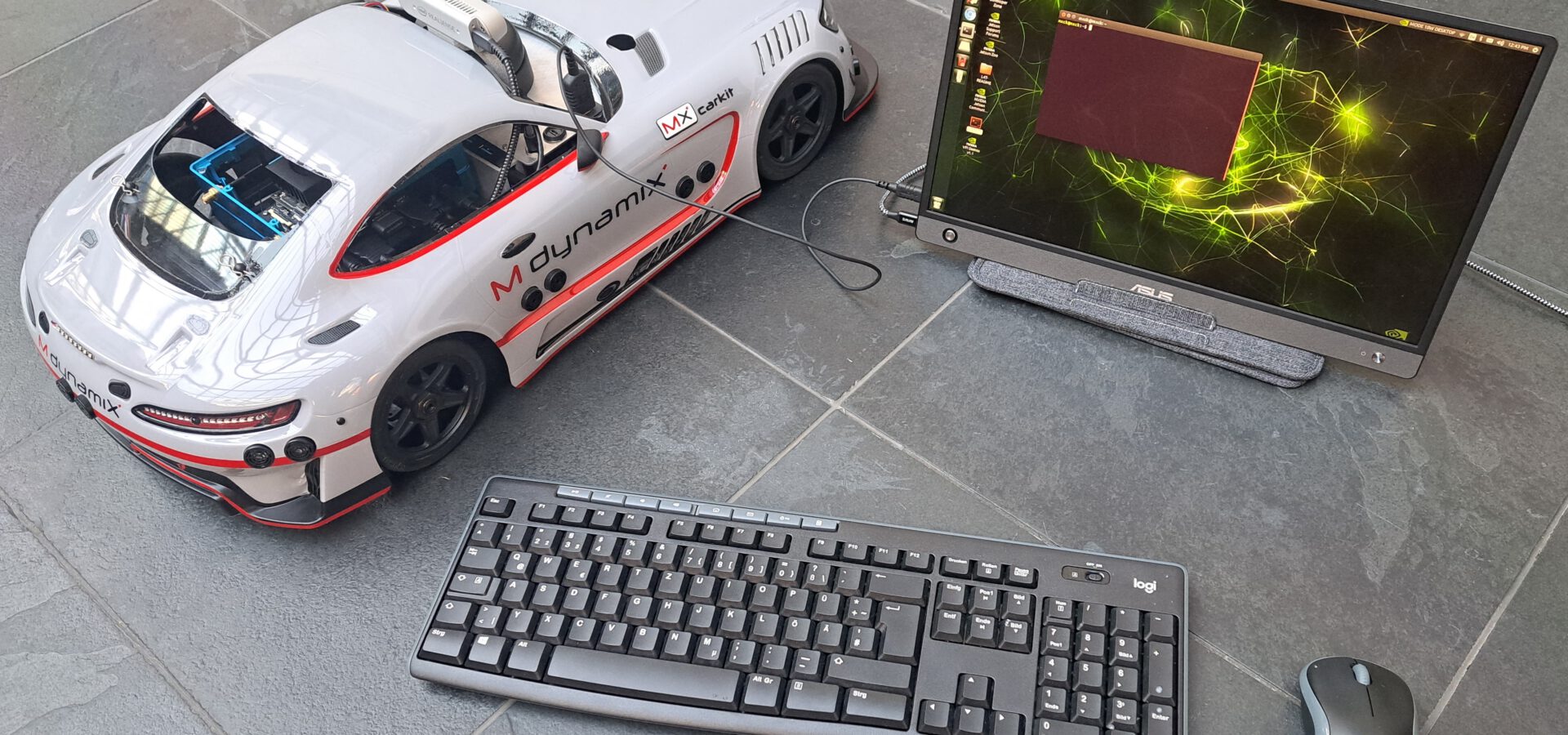
The basic version of the MXcarkit is the ideal first step into the world of autonomous driving research. Alternatively, you can opt for a Jetson NX with more computing power. For an additional charge, there are several optional updates, such as a lidar, vehicle illumination and ultrasonic sensors.
Content:
Vehicle Platform
- Body: Mercedes-AMG GT3 or BMW 3.0 CSL
- Motor control: VESC based
- Control units power supply: 25Ah powerpack
- Powertrain supply: 4S LiPo, 6.2Ah
- Steering motor: ultra-high speed and high torque servo
Sensors
- Stereo-camera: Intel® RealSense™ Depth Camera D435i with integrated IMU
- IMU: ICM-20948 9-DOF IMU with integrated 3-axis accelerometer, gyroscope, and magnetometer
- RC-Receiver: 14 Chanel, 2.4GHz
- 10x ultrasonic sensors with built-in temperature compensation (optional)
- LiDAR: RPLIDAR A2M12 (optional)
Control Unit
- STM32 microcontroller for sensor handling (IMU, ultrasonic sensors), RC-Receiver bridging and vehicle light-control
- NVIDIA Jetson Orin Nano Super Developer Kit powerful edge AI computer with Wi-Fi, SSD storage, and pre-installed MXcarkit software stack
- Other NVIDIA Jetson modules available on request (optional)
Body
- Professionally painted car body with cutouts for camera and lidar
- Mounted ultrasonic sensors
- Vehicle light kit (headlights, rear lights, high beam, indicator lights, 3rd brake light) – available only in combination with the Mercedes-AMG body (optional)
Software
- Pre-installed JetPack System
- Pre-installed Docker image with ready-to-run ROS2 environment
- Sensors and actuator nodes implemented in ROS2 interacting with the Jetson control unit. If installed that also applies for the vehicle light kit
- Sample applications: manual steering with RC remote control, object recognition, Lane Keeping Assist
Accessories
- RC remote control
- Powerpack and LiPo charger
- NVIDIA Jetson power supply
- LiPo charging bag