
Consistent evaluation of automated driving functions with Vehicle-in-the-Loop

Automated driving functions have become an integral part of the automotive industry. Parking maneuvers, in particular, are well-suited for automation due to their low speed and small operating space. The challenge lies in ensuring that such functions are not only safe but also accepted by vehicle occupants. In this context, we demonstrate in cooperation with IPG Automotive and Kempten University of Applied Sciences, how a consistent evaluation of automated driving functions can be implemented with MXeval and a ViL vehicle.
Challenges in Testing Parking Functions
The increasing automation of parking functions poses complex and costly testing requirements for developers. Realistic test scenarios, such as the sudden appearance of obstacles, are challenging to replicate in real driving situations and require significant effort. The ViL-Method addresses this by combining the advantages of real test drives with the precision of computer-based simulation.
Overview of the ViL-Method
The Vehicle-in-the-Loop-Method places a real vehicle in a simulation environment, which also stimulates the vehicle’s entire sensor system. This allows developers to perform virtually realistic driving maneuvers, significantly increasing the flexibility and efficiency of test procedures. The degree of realization spans from the Software and Model-in-the-Loop phase to the Hardware-in-the-Loop test and finally to the ViL-test. Despite identical scenarios in real traffic, the setup time in simulation is significantly shortened.

Practical Implementation with CarMaker and MXeval
The implementation of the ViL-Method is based on the open platform CarMaker from IPG Automotive. The test vehicle is integrated into the virtual environment, with MXeval, our evaluation and targeting software, playing a central role. MXeval enables the automated evaluation of measurement data and the definition of Key Performance Indicators (KPIs). This leads to a standardized and efficient assessment of vehicle maneuvers in different development stages.
Advantages and Results
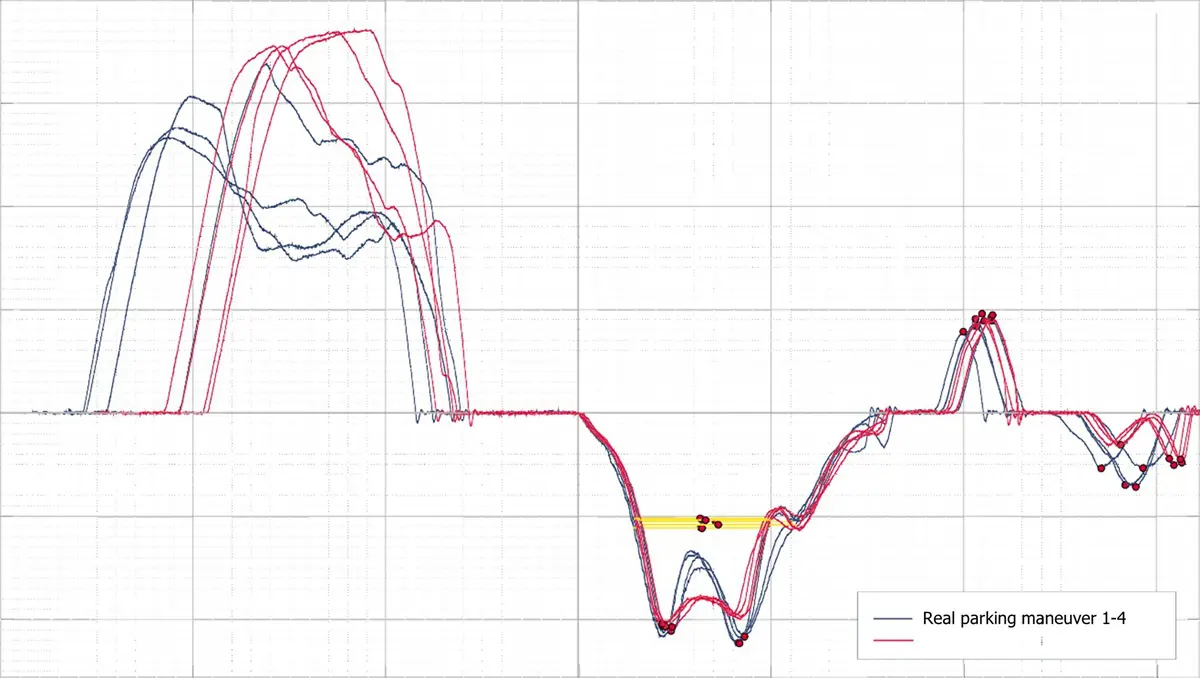
The ViL-Method allows not only the testing of automated parking functions but also advanced driver assistance systems based on radar, lidar, camera, and/or ultrasound. The simulation offers nearly limitless possibilities to represent and test all types of parking maneuvers. The comparison of real and virtual measurements shows a remarkable agreement, especially in the initial phase of parking maneuvers. The KPI-based evaluation using MXeval ensures an objective and reproducible assessment.
Summary and Outlook
The ViL-Method, supported by products like MXeval and CarMaker, forms an efficient foundation for the development and evaluation of automated driving functions. By leveraging virtual scenarios, developers can conduct realistic tests with reasonable effort, thus assessing the maturity of their functions in all development stages. With an eye on the increasing demands for the validation and homologation of vehicle systems, the ViL method shows significant potential, especially in safety-critical tests like NCAP trials.
Read the full article to find out more about our joint project:
