
Durchgängige Bewertung von automatisierten Fahrfunktionen mit Vehicle-in-the-Loop

Automatisierte Fahrfunktionen haben sich als fester Bestandteil in der Automobilindustrie etabliert. Besonders Einparkmanöver eignen sich aufgrund ihrer geringen Geschwindigkeit und des kleinen Aktionsraums gut zur Automatisierung. Die Herausforderung besteht darin, dass solche Funktionen nicht nur sicher, sondern auch von den Fahrzeuginsassen akzeptiert werden müssen. In diesem Kontext zeigen wir gemeinsam mit IPG Automotive und der Hochschule Kempten, wie eine durchgängige Bewertung von automatisierten Fahrfunktionen mit MXeval und einem ViL-Fahrzeug umgesetzt werden kann.
Herausforderungen bei der Erprobung von Parkfunktionen
Die zunehmende Automatisierung von Parkfunktionen stellt Entwickler vor komplexe und kostspielige Testanforderungen. Insbesondere realistische Testszenarien, wie etwa das plötzliche Auftauchen von Hindernissen, sind in realen Fahrsituationen schwer darstellbar und erfordern erheblichen Aufwand. Hier setzt die ViL-Methode als Lösung an, indem sie die Vorteile von realen Testfahrten mit der Präzision der computergestützten Simulation kombiniert.
ViL-Methode im Überblick
Die Vehicle-in-the-Loop-Methode versetzt ein reales Fahrzeug in eine Simulationsumgebung, welche auch die gesamte Sensorik des Fahrzeuges anregt. Hierdurch können Entwickler virtuell realitätsnahe Fahrmanöver durchführen, wodurch sich die Flexibilität und Effizienz von Testverfahren erheblich steigert. Der Grad der Realisierung erstreckt sich von der Software- und Modell-in-the-Loop-Phase bis zum Hardware-in-the-Loop-Test und schließlich zum ViL-Test. Dabei bleibt die Setup-Zeit in der Simulation trotz identischer Szenarien im realen Straßenverkehr deutlich verkürzt.

Praktische Umsetzung mit CarMaker und MXeval
Die Umsetzung der ViL-Methode erfolgt auf der offenen Plattform CarMaker von IPG Automotive. Das Testfahrzeug wird in die virtuelle Umgebung integriert, wobei MXeval, unsere Auswerte- und Targetingsoftware, eine zentrale Rolle spielt. MXeval ermöglicht die automatisierte Auswertung von Messdaten und die Definition von KPIs. Dies führt zu einer standardisierten und effizienten Bewertung der Fahrzeugmanöver in unterschiedlichen Entwicklungsstufen.
Vorteile und Ergebnisse
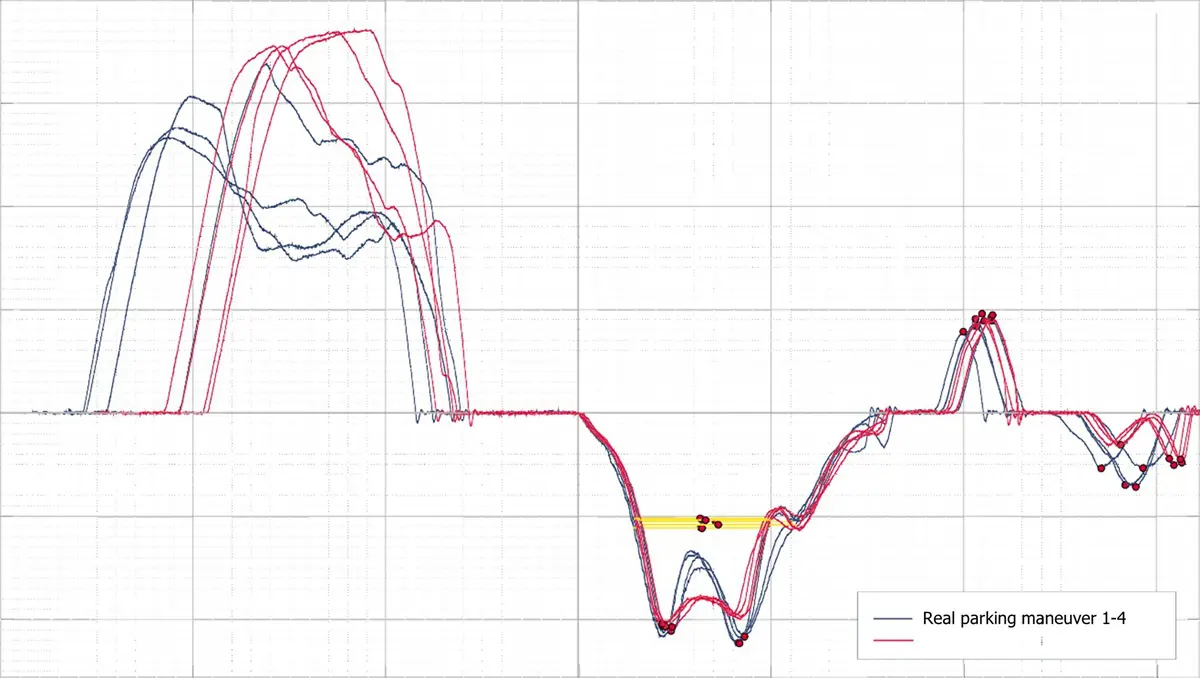
Die ViL-Methode ermöglicht nicht nur die Prüfung von automatisierten Einparkfunktionen, sondern auch von fortschrittlichen Fahrerassistenzsystemen, die auf Radar, Lidar, Kamera und/oder Ultraschall basieren. Die Simulation bietet nahezu unbegrenzte Möglichkeiten, alle Arten von Einparkmanövern darzustellen und zu testen. Der Vergleich von realen und virtuellen Messungen zeigt eine bemerkenswerte Übereinstimmung, insbesondere in der Initialphase von Einparkmanövern. Die KPI-basierte Auswertung mittels MXeval gewährleistet eine objektive und reproduzierbare Bewertung.
Zusammenfassung und Ausblick
Die ViL-Methode, unterstützt durch Produkte wie MXeval und CarMaker, bildet eine effiziente Grundlage für die Entwicklung und Bewertung automatisierter Fahrfunktionen. Durch die Möglichkeit, virtuelle Szenarien zu nutzen, können Entwickler mit vertretbarem Aufwand realitätsnahe Tests durchführen und somit den Reifegrad ihrer Funktionen in allen Entwicklungsstufen bewerten. Mit Blick auf die steigenden Anforderungen an die Validierung und Homologation von Fahrzeugsystemen zeigt die ViL-Methode erhebliches Potenzial, insbesondere bei sicherheitsrelevanten Tests wie NCAP-Versuchen.
Vertiefende Informationen zu unserem gemeinsames Projekt lesen Sie im vollständigen Artikel:
