
Increasing efficiency through model-based development: A case study of the steer-by-wire force feedback actuator
The importance of model-based development for product development
Model-based engineering (MBE) has established itself as a key technology for reducing resource consumption and costs in product development. This report uses a case study to show how significant savings can be achieved by using MBE in the development of a steer-by-wire (SbW) force feedback actuator.
Challenges of traditional force feedback actuators
Traditional force feedback actuators in SbW systems often use large and energy-intensive electric motors to generate the required torque. These systems are not only expensive to manufacture, but also inefficient to operate. The paper describes the model-based development of a novel actuator that combines a direct drive electric motor with a magnetorheological (MR) brake to address these challenges.
Model-based development for precise simulation and optimization
Model-based development enabled precise simulation and optimization of the actuator design. By using simulation models, different design variants could be evaluated quickly and cost-effectively. This led to a significant reduction in development time and costs.
MBE process in the V-model: development of the steer-by-wire force feedback actuator
The MBE process included the following steps in the V-model:
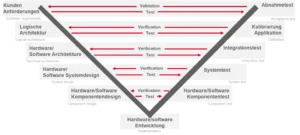
- Requirements analysis: creating models that represent the requirements of the system.
Based on the principles of model-based development (MBE), the requirements for an SbW-MRFA actuator were defined using the experience of the project partners and a comprehensive requirements analysis. These requirements include the functional specifications with regard to the required torques and power. It is particularly important to differentiate between areas relevant to steering feel and end stops. A detailed list of requirements was drawn up. This list forms the basis for the system design and the modelling of the demonstrator.
- System design: development of models that describe the architecture and design of the system.
The MR simulation model plays a decisive role in the rapid development and realization of the demonstrator. Through the simulation, controllers can be designed or optimized in the simulation before the actual construction of a prototype and errors can be corrected. The physical behavior of the MR brake and the electric motor are also modeled and examined for interactions with the other model parts. The entire architecture can be linked according to the theoretical models and implemented at an early stage.
- Implementation: Generation of code or hardware from the models.
The real-time hardware selected in parallel to the system design according to the requirements can already be checked for operability without an actuator. With model-based development, it is possible to make models developed in a Windows simulation environment usable in a real-time environment. The models are automatically translated into C/C++ code and converted into real-time objects. These can be used seamlessly in engineering, e.g. debugging and linking with fieldbus devices. The block diagram visualization from the simulation environment is adopted in engineering and can be used for parameter adjustment, debugging and signal and status monitoring.
- Verification and validation: checking the models and the implemented system against the requirements.
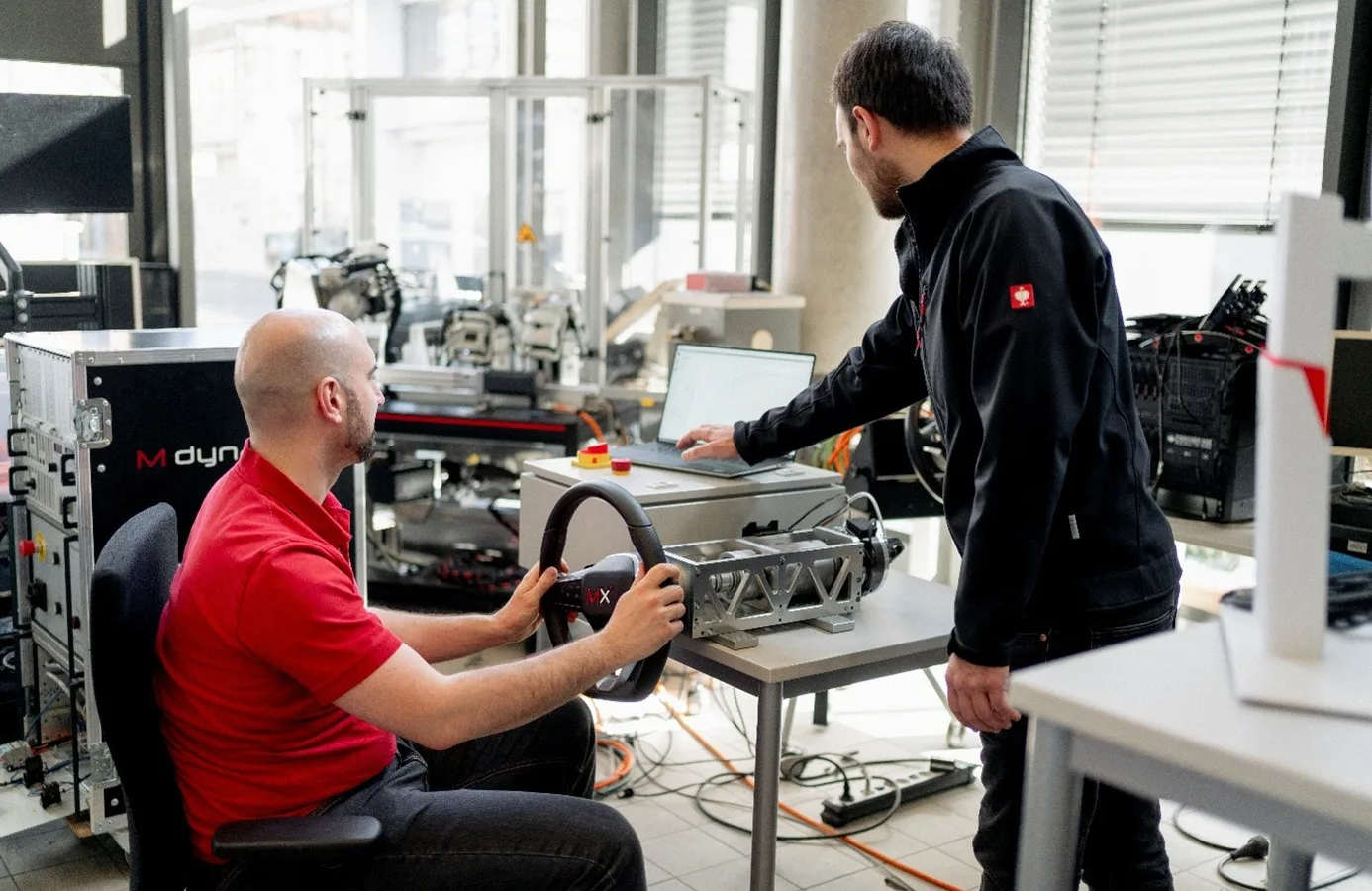
Verification and validation are crucial steps in the process of model-based development. Verification ensures that the developed models correctly and completely fulfil the requirements from point 1. This is done by systematically checking and testing the models. Validation, on the other hand, ensures that the developed system meets the real requirements and expectations. This is achieved through simulations and practical tests, such as “driver-in-the-loop”. Verification is primarily carried out objectively with synthetic tests and validation with subjective assessment and subject studies.
Performance of the developed actuator
Simulations and driver-in-the-loop tests showed that the combined actuator has a high level of performance and reliability. The developed torque splitter algorithm ensures high feedback accuracy and stable control under different driving dynamics conditions. The expert evaluation confirmed that the steering feel of the new actuator is equivalent to that of a pure electric motor, but with lower costs and energy consumption.
Advantages of model-based development:
- Efficiency: by using models, different controller options could be evaluated quickly and cost-effectively. Models can be built and connected much faster in a pure simulation environment. This offers major time advantages compared to building directly on a control unit with complex interfaces.
- Quality: Models enable errors to be detected and rectified at an early stage, which improves quality. Unlike with real systems, the controller can be optimized automatically with models in multiple real time.
Efficiency gains without compromises through model-based development
Model-based development has made it possible to develop and realize an innovative SbW force feedback actuator in a short time that is both resource-saving and cost-efficient. Contrary to the initial planning, the method used even allowed a development loop to be inserted and weaknesses of the first demonstrator to be rectified in the second demonstrator. The models set up could continue to be used practically unchanged. This case study shows how significant savings can be achieved through the use of MBE without compromising on performance.
Acknowledgements:
This study was supported by the European Union “Interreg Bavaria-Austria”.
Photo credit: Alexander Ratzing

