
Beurteilung und Abstimmung von Bremssystemen – von der Simulation zum Prüfstand
MXbrakeHiL: Eine Hardware-in-the-Loop Prüfumgebung für die Bremssystementwicklung und ESC-Validierung
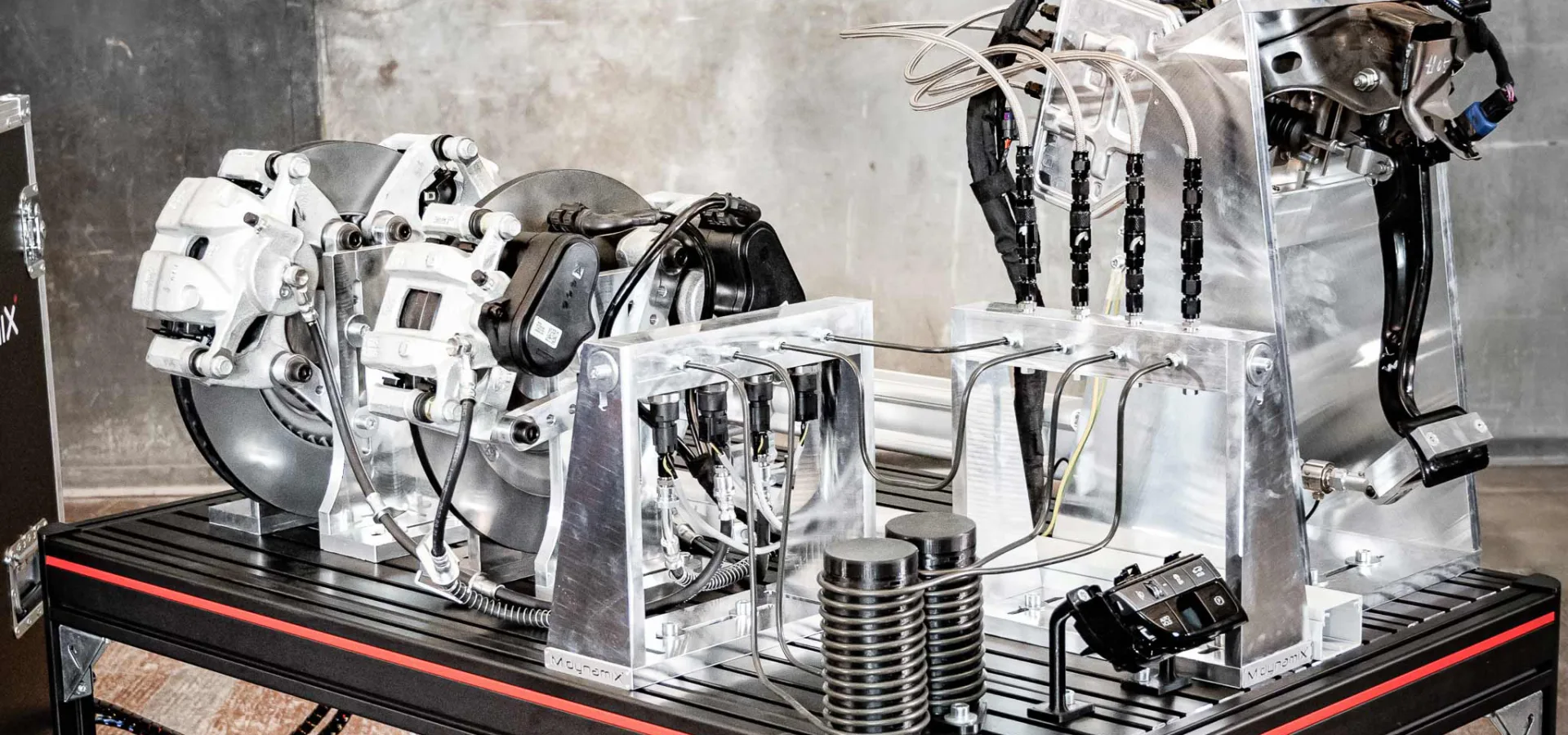
MXbrakeHiL ist ein Hardware-in-the-Loop (HiL) Prüfsystem, der eine vollständige physische Bremsanlage – vom Bremspedal bis zu den Bremssätteln – direkt in eine echtzeitfähige Fahrzeugsimulationsumgebung integriert. Dies ermöglicht die Erprobung, Bewertung und Applikation von ESC-Steuergeräten sowie sicherheitskritischer Bremsfunktionen noch bevor ein Fahrzeugprototyp verfügbar ist. Gleichzeitig reduziert das System die Simulationskomplexität und unterstützt die systematische Absicherung auf allen Ebenen des V-Modells.

Elektro- und autonome Fahrzeuge erfordern eine präzise Entwicklung von Bremsfunktionen und Steuerungen für die Fahrzeugdynamik. Reine Simulationsmodelle stoßen an ihre Grenzen, wenn es darum geht, die in physischen Bremssystemen vorhandenen hydraulischen Nichtlinearitäten, Reibungsvorgänge und Ventildynamiken nachzubilden. MXbrakeHiL löst dieses Problem, indem es echte Hardware in den Regelkreis einbindet, wodurch die Notwendigkeit entfällt, diese physikalischen Effekte mathematisch zu modellieren.
MXbrakeHiL – Aufbau
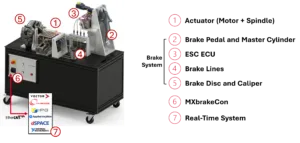
Die bewährte und Bauteil übergreifende Prüfstand-Architektur

Hardwaregekoppelte Prüfung: Physikalisches Systemverhalten, reproduzierbare Randbedingungen, objektive Bewertung
Physikalische Systemtreue durch unveränderte Hardwarekomponenten: Unveränderte Hardwarekomponenten geben den tatsächlichen Druckaufbau, die dynamische Hysterese und die ABS-Modulationsprofile originalgetreu wieder. Ein Verhalten, das parametrische Simulationsmodelle nicht zuverlässig nachbilden können.
Reproduzierbare Szenarioerprobung: Fahrbahnbeschaffenheit, Fahrzeuggeschwindigkeit und Umweltfaktoren werden im Simulationsmodell definiert und systematisch variiert, um Funktionen wie Automatische Notbremsung (AEB) und ESC unter stets identischen Ausgangsbedingungen zu validieren.
Offene Architektur zur Parameteroptimierung: Der Prüfstand unterstützt komplexe Parametervariationen und die Bewertung von Applikationsvarianten. Dank der vollständigen Beobachtbarkeit der Hardwarekette und der Integration mit MXeval können Ingenieure Kriterien wie Fahrstabilität, Bremsblending-Logik und Hardwarewechselwirkung innerhalb eines einzigen Testzyklus bewerten.

Objektive KPI-basierte Bewertung und frühzeitige Absicherung entlang des V-Modells
MXbrakeHiL ist auf modellbasierte Systementwicklungsprozesse ausgerichtet.
- Automatisierte KPI-Auswertung durch MXeval-Integration: Der Prüfstand ist vollständig in MXeval eingebunden und erstellt eine automatisierte, KPI-basierte Analyse des Bremssystemverhaltens. Dies erlaubt eine strukturierte, datengestützte Bewertung von Kenngrößen wie Pedaldruckverlauf, Fahrstabilität und Druckaufbaudynamik.
- Vorgelagerte Absicherung entlang des V-Modells: Durch die Vorverlagerung der Erprobung und Absicherung auf alle Phasen des V-Modells können Ingenieure die Konstruktionsparameter optimien und Funktionsfehler frühzeitig beheben. Dadurch reduziert sich der Aufwand für Fahrversuche in späteren Entwicklungsphasen und die Entwicklung wird insgesamt beschleunigt.
Echtzeitsystemkompatibilität und modulare Konfigurierbarkeit
MXbrakeHiL ist kompatibel mit den führenden Echtzeitsimulationsplattformen, die in der Bremssystem- und Fahrdynamikentwicklung eingesetzt werden: RT Systems wie VI-grade AutoHawk, Concurrent Real-Time iHawk, Vector VN & VT, dSpace Scalexio, IPG Xpack und weitere.
Unterstützte Fahrzeugmodelle umfassen Vector DYNA4, IPG CarMaker, dSpace ASM sowie anwenderspezifische MATLAB/Simulink-Modelle. Das System ist auf eine nahtlose Schnittstellenintegration mit diesen Plattformen ohne zusätzliche Anpassungsschritte ausgelegt.
Die Hardwarekonfiguration ist modular aufgebaut. Der Prüfstand kann mit zusätzlichen Sensoren, Aktuatoren oder universellen Emulationsmodulen an spezifische Prüfanforderungen angepasst werden, ohne grundlegende Änderungen an der Systemarchitektur vornehmen zu müssen.

Key Facts des MXbrakeHiL
- Bremssystemkompatibilität: Vollständige nasslaufende Bremsanlage im Regelkreis integriert – vom Bremspedal bis zu den Bremssätteln.
- Testabdeckung: Unterstützt HiL- und DiL-Prüfkonfigurationen – von der frühen ESC-Softwareintegration bis zur Systemvalidierung im V-Modell.
- Hohe Messgenauigkeit: Authentische Reproduktion der Druckaufbaudynamik, dynamischer Hysterese und ABS-Modulationsprofile durch reale Hardwarekomponenten.
- Modulares, skalierbares Konzept: Offenes, modulares Konzept mit schnell wechselbaren Aufbauten; erweiterbar mit zusätzlichen Sensoren, Aktuatoren oder universellen Emulationsmodulen.
- Echtzeitintegration: Kompatibel mit allen EtherCAT-fähigen Echtzeitsystemen, darunter VI-grade AutoHawk, Concurrent Real-Time iHawk, Vector VN & VT, dSpace Scalexio, IPG Xpack und weitere.
- Softwarekompatibilität: Vollständige Integration mit MXeval zur automatisierten, KPI-basierten Auswertung des Bremssystemverhaltens.
- Plug & Play: Unkomplizierte Inbetriebnahme durch vorkonfigurierte Schnittstellen.
- Fahrzeugmodelle: Unterstützt kommerzielle Fahrzeugmodelle wie Vector DYNA4, IPG CarMaker, dSpace ASM sowie anwenderspezifische MATLAB/Simulink-Fahrzeugmodelle.
- Messtechnik: Vollständige Beobachtbarkeit der gesamten Hardwarekette während jedes Prüflaufs.
- Optimierung: Unterstützt komplexe Parametervariationen und die Bewertung von Applikationsvarianten
- V-Modell-Abdeckung: Unterstützt Erprobung und Absicherung auf allen Reifegradebenen des V-Modells.
Vorteile des MXbrakeHiL für Entwicklungs- und Validierungsteams
- Beseitigt die Abhängigkeit von hydraulischen Modellen: Durch den Einsatz unveränderter physischer Hardware im Regelkreis entfällt die Notwendigkeit, für jede Hardwarevariante eigene hydraulische Simulationsmodelle zu erstellen und zu validieren.
- Reduzierte Prototypenabhängigkeit: ESC-Steuergerätesoftware kann gegen reale Bremshardware erprobt und validiert werden, bevor ein Fahrzeugprototyp verfügbar ist.
- Reproduzierbare, kontrollierte Prüfbedingungen: Fahrbahnbeschaffenheit, Geschwindigkeit und Umgebungsparameter werden in der Simulation definiert und eliminieren so die Streuung bei der Versuchsdurchführung.
- Automatisiertes Regressionstesting: Parameter- oder Softwareänderungen können ohne kontinuierlichen manuellen Prüfstandsbetrieb gegenüber identischen Testszenarien bewertet werden.
- Objektive, strukturierte KPI-Auswertung: Die MXeval-Integration liefert konsistente Bewertungsergebnisse für Pedaldruckverlauf, Fahrstabilität und Druckaufbaudynamik sowie komplexe KPIs für Slalom- und Spurwechselmanöver.
- Kompatibilität mit bestehenden Toolketten: Direkte Schnittstellenintegration mit Echtzeitsystemen und Fahrzeugmodellen von VI-Grade, Vector, IPG, dSpace und MATLAB/Simulink
- Konfigurierbare Hardwareplattform: Die modulare Architektur unterstützt zusätzliche Sensoren, Aktoren oder Emulationsmodule, um projektspezifischen Anforderungen gerecht zu werden.
- Frühzeitige Fehlererkennung: Funktionsstörungen in der Bremssteuerungslogik oder der ESC-Kalibrierung werden bereits auf dem Prüfstand erkannt – in einer früheren Phase des V-Modells, in der Korrekturen noch kostengünstiger sind.
- Vollständige Beobachtbarkeit der Hardwarekette: Sämtliche Signale der physischen Bremsanlage sind während jedes Prüflaufs vollständig zugänglich und auswertbar.
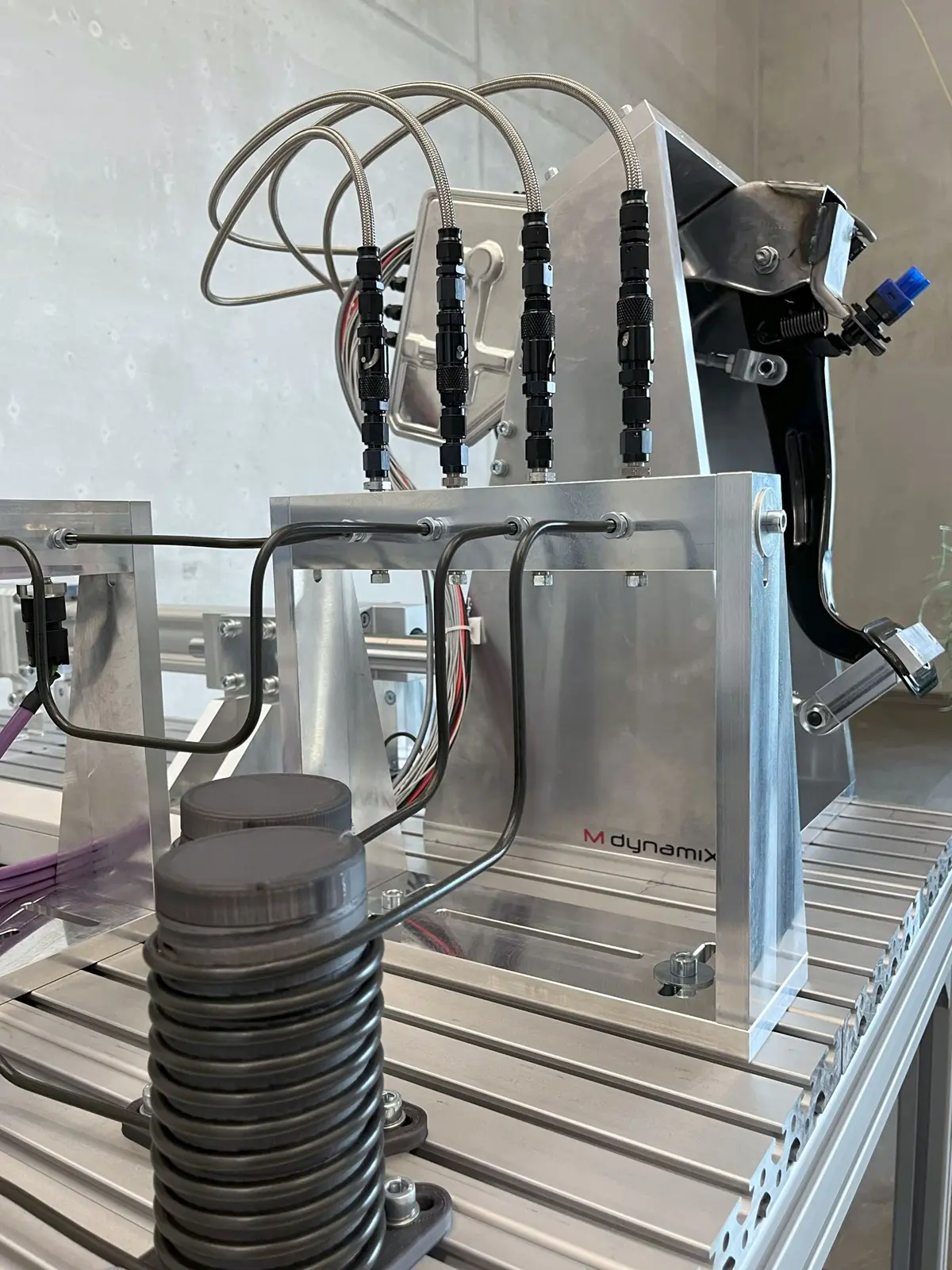
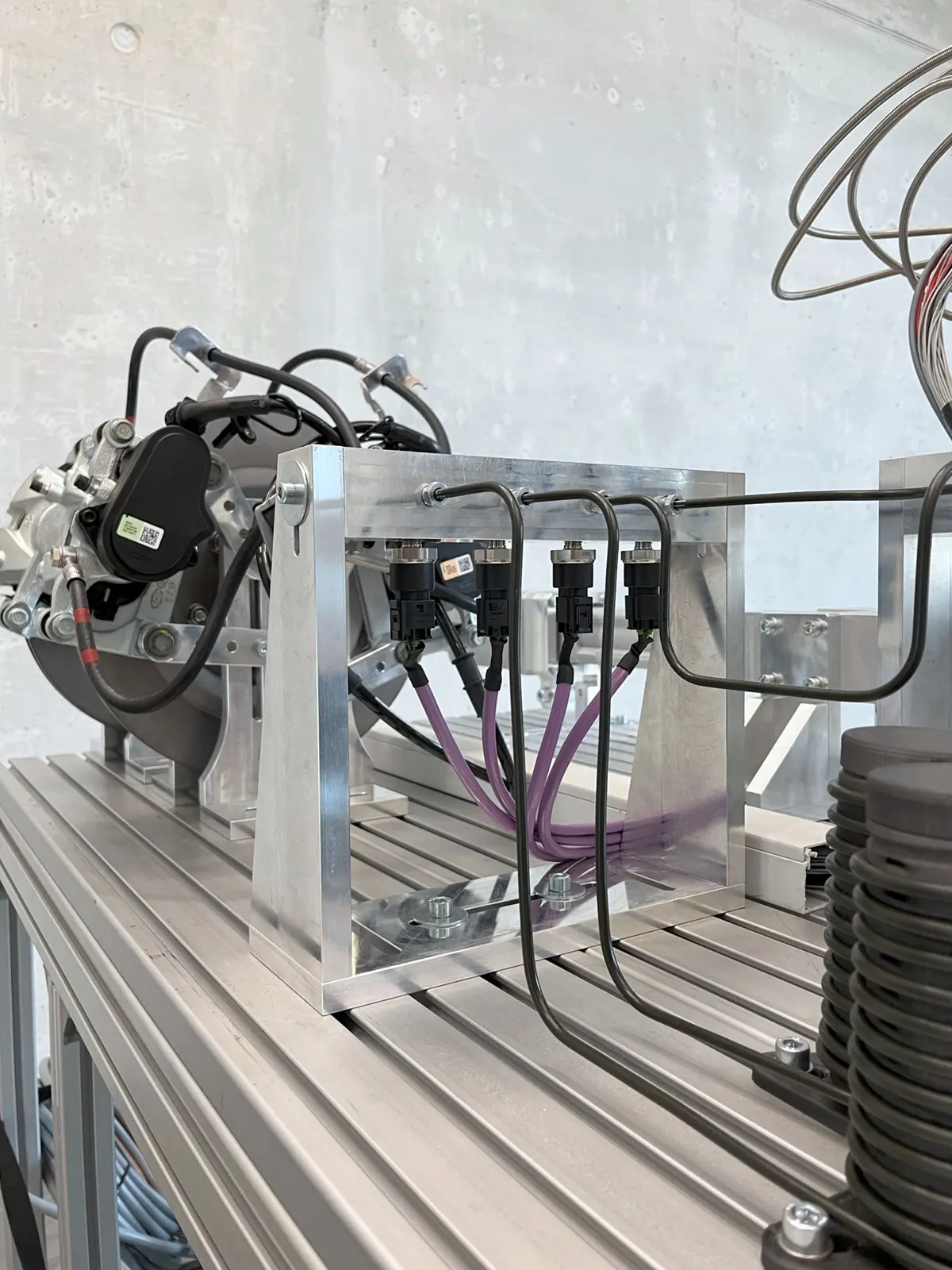
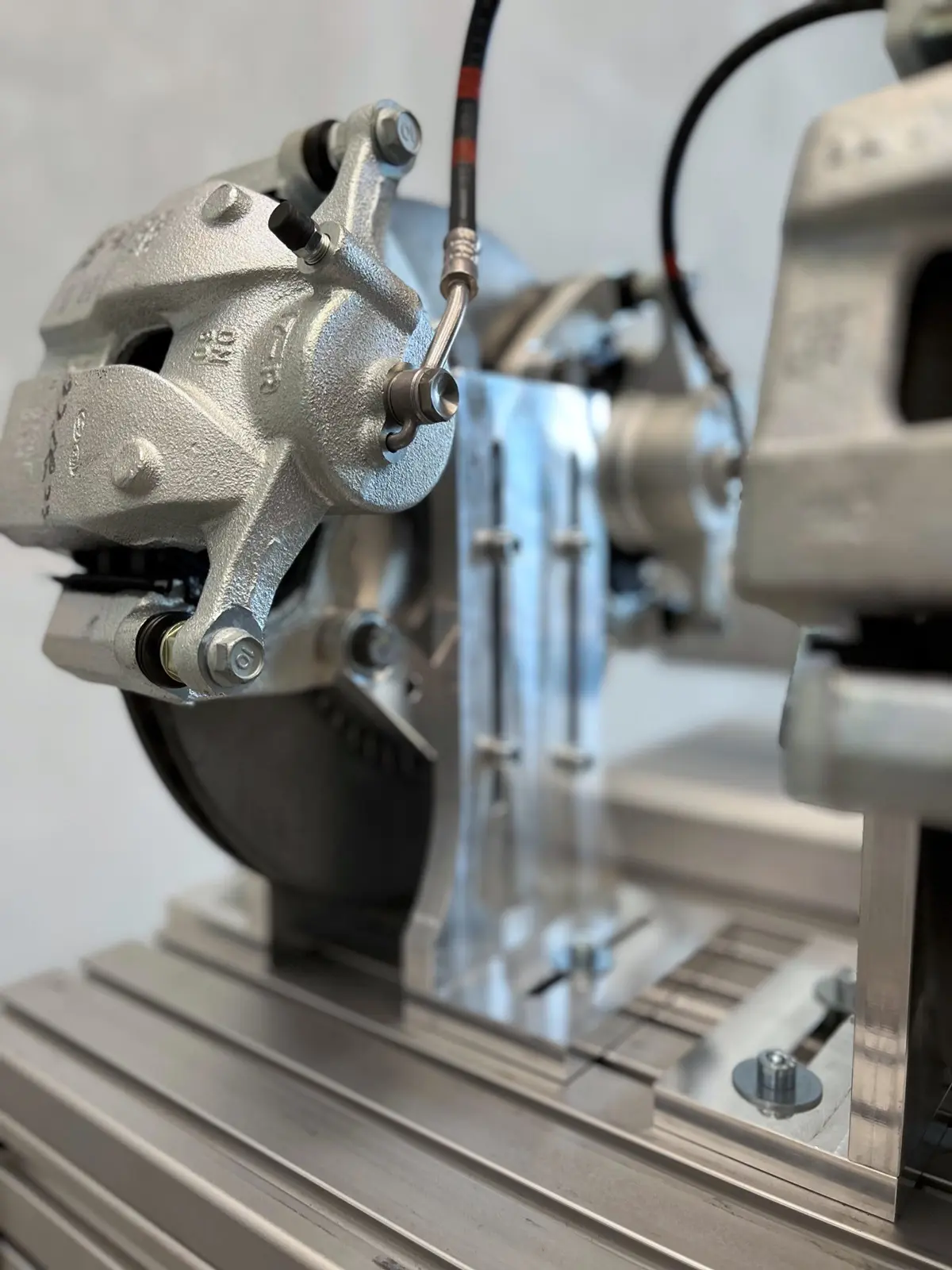
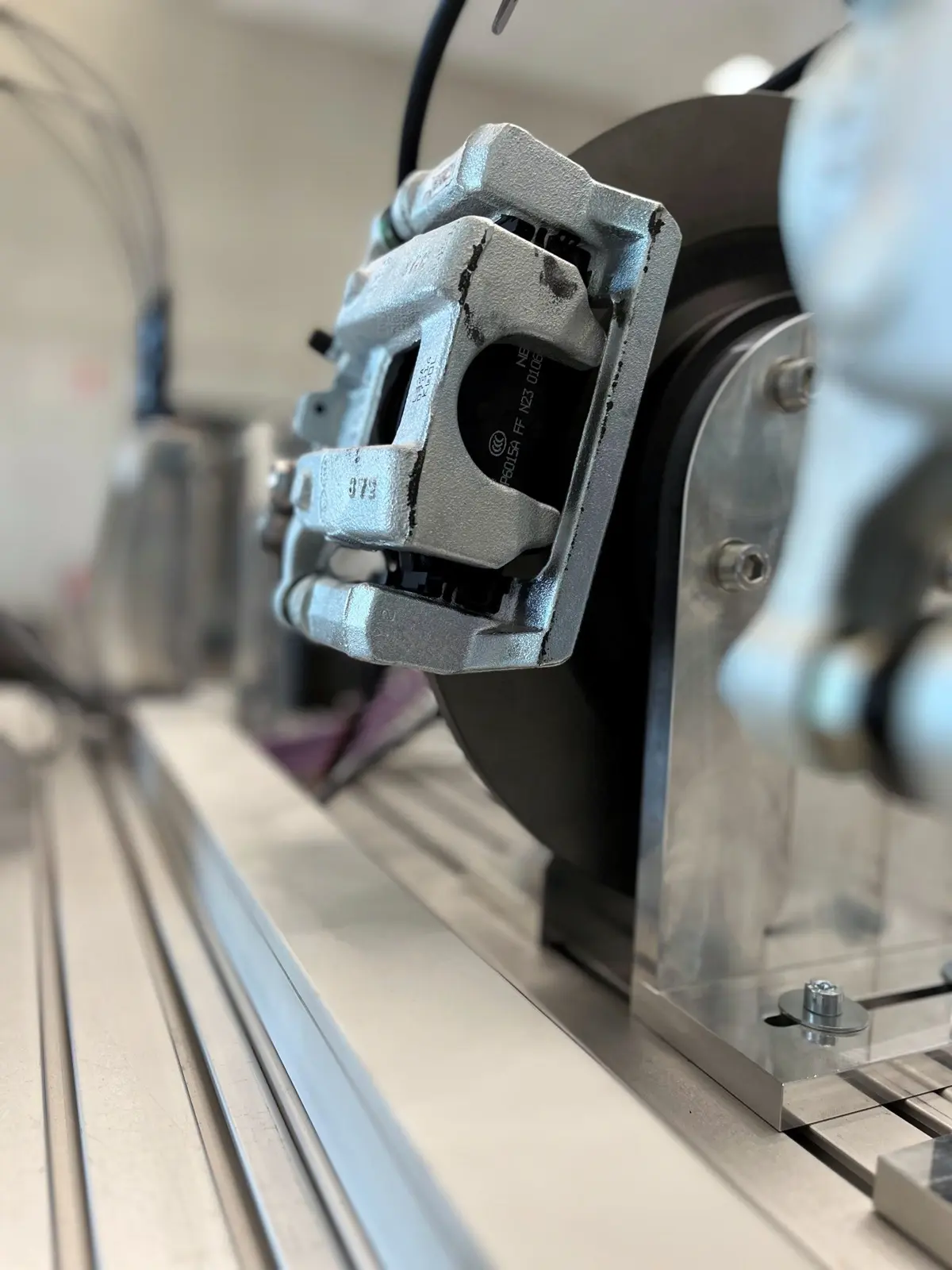
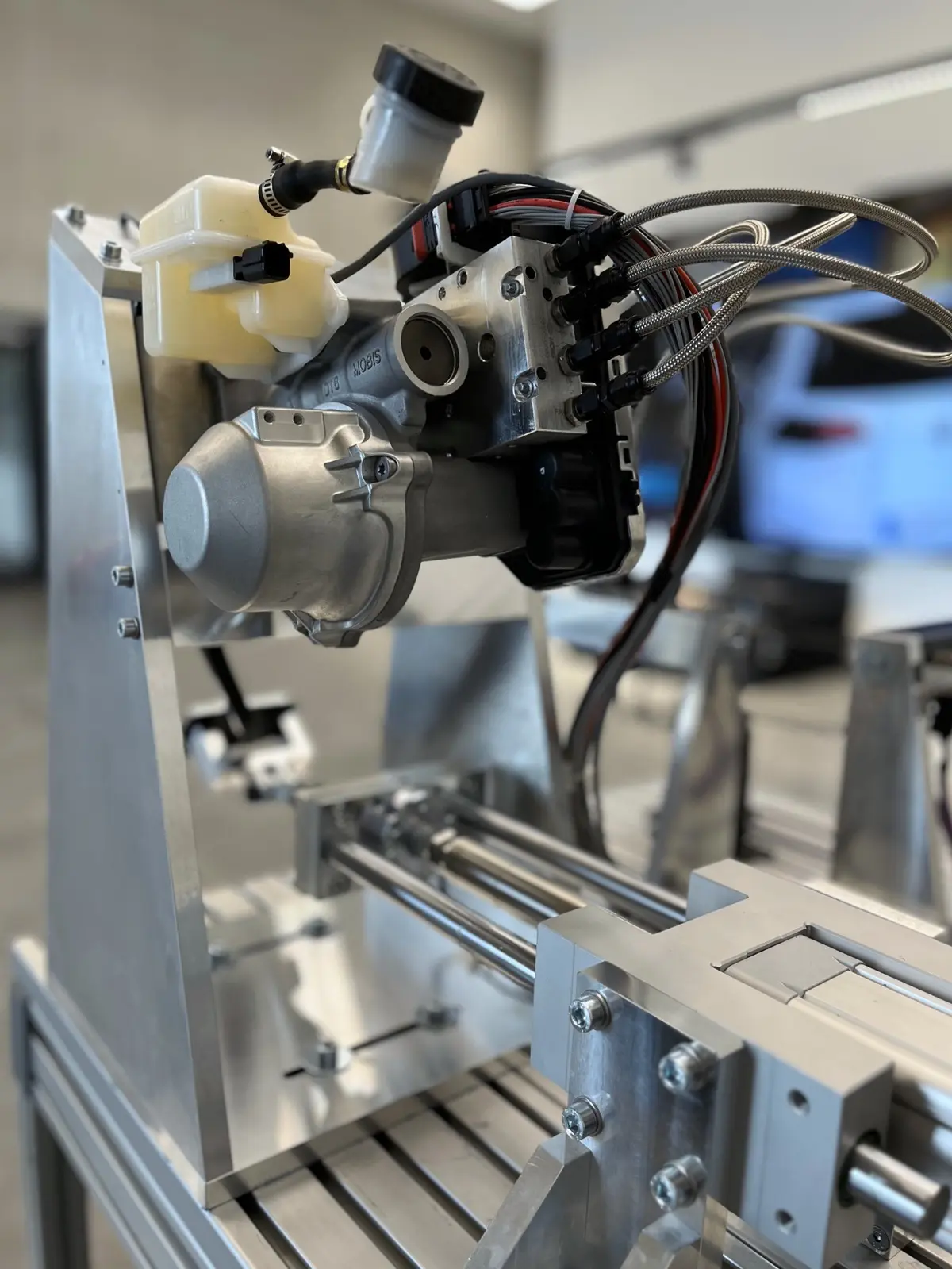
MXbrakeHiL Impressionen





MXbrakeHiL richtet sich an Entwicklungs- und Validierungsteams, die an ESC-Software, Bremssystemapplikation und sicherheitskritischen Bremsfunktionen arbeiten. Kontaktieren Sie uns, um Ihre Prüfsystemanforderungen zu besprechen.